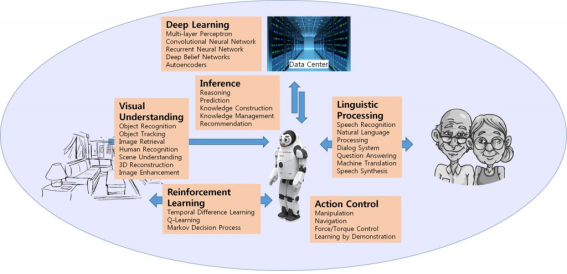
Artificial intelligence lab studies practical artificial intelligence that can be applied to robots. Service robot technology differentiates itself from other IT technologies by continuous real-time interaction with the environment like humans. As humans understand the environment through the five senses, robots can understand the environment by information processing of cameras, microphones, tactile sensors, etc.
Deep learning has developed rapidly in the 2010s, demonstrating performance of recognition and pattern classification in human level. Deep learning is expected to become a key technology in the service robots. FRCNN, VGG, GoogleNet, and Residual Network, which are currently performing well will be utilized for basic research. Because these technologies are specialized in the classification of static images, research will be extended to to cover consecutive information by applying Recurrent Network, such as LSTM, to operate robots by using real-time videos.
Deep Reinforcement Learning is one of the key technologies for robots to build intelligence from the interaction with the environment. A long-term study focuses on the biological neural network, Spiking Neural Network, which can exceed the limits of conventional frame-based Artificial Neural Network. Because Spiking Neural Network has more biologically plausible neuron model that has temporal dynamics, it has the potential to achieve better performance when applying to agents that need to adapt to dynamic environments such as robots.